コントローラー 通信アプリ開発、モータ特性試験 技術部での業務内容の紹介
こんにちは。今月のブログ担当、K’zです。
ラジオ体操が心地よい季節になってまいりました。弊社では日替わりでラジオ体操第一と第二が交互に入れ替わるので毎日楽しくラジオ体操をすることができます。持病の腰痛にも効果があるのかなと思っています。
腰痛に関してですが、私は小学生のころから腰痛に悩まされています。色々調べてみると、腰痛にも色々タイプが有るようで、診断されたわけではないですが、私は「反り腰」+「左右のゆがみ」なのかなと思います。反り腰とは・・・
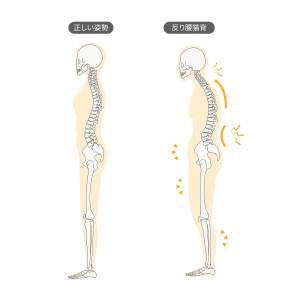
図の様にお尻付近の背骨が内側に反っている状態です。私は猫背でもあり、お尻が出っ張り気味でもあります。私の反り腰の場合は、静止して立っているだけで腰が痛くなります。「反り腰 対策」で検索したら良く出てくるのですが、色々なストレッチ方法が紹介されています。自分に合ったストレッチを見付けるのが一番です。
しかし実は自分にとって、机作業で一番効果が有る方法は「座り方」でした。通常は背筋を伸ばして姿勢を正し、深く座るのが良いとされていますが、私の場合は真逆の「浅く」座ると楽になります。ふんぞり返る様な座り方で「ずっこけ座り」というらしいです。他者から見たら明らかに「態度が悪く」見られてしまいます。ネットで調べてみると、この座り方はヘルニアの原因にもなるらしいです。しかし「本当に腰痛が辛い」ので、周りを気にせずに?(気にしつつ)私は座っています。このブログを拝見された同僚の方にはご理解いただけますと嬉しい限りです。
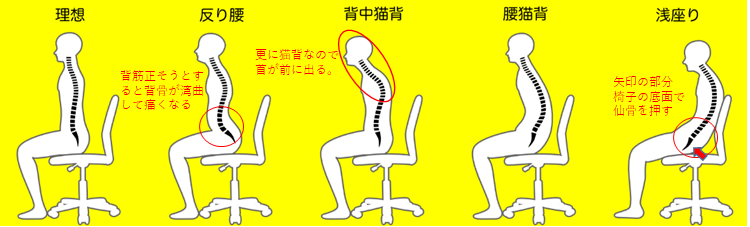
恐らく・・・浅く座ることで、椅子の座面に腰部の「仙骨」を押し当てて伸ばす(逆反り)ことができるからだと思います。出っ張りを引っ込める様に押し込むと「私」の場合には、痛みが取れ楽になるのです。(人によっては悪化の可能性が有る為、真似しない方が良いかもしれません。)
一方、長時間の座り作業は「がん、心筋梗塞」のリスクを高めるそうで、「座り作業」を「立ち作業」で出来たら健康的にも良いのにと思う日々でした。弊社の生野社長は「立ち作業」・「立ち椅子作業」を誰よりも先駆けて取り入れていますので、私も見習って、また健康経営優良法人の取り組みの一環として、御提案してまいりたいと思います。
さて、ここから本題です。
私の業務内容から一部をピックアップして紹介いたします。
1.モータコントローラ+アプリ開発
2.モータの特性試験
<①モータコントローラ+アプリ開発>
モータコントローラーのアプリ開発は私の前回のブログ に書きました。
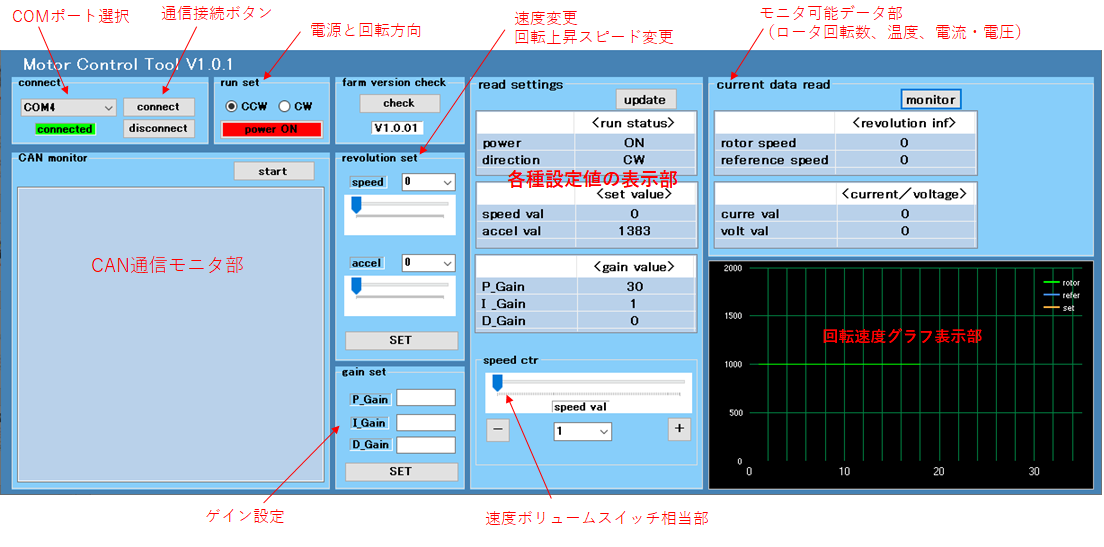
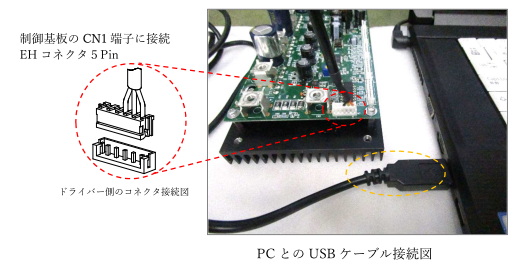
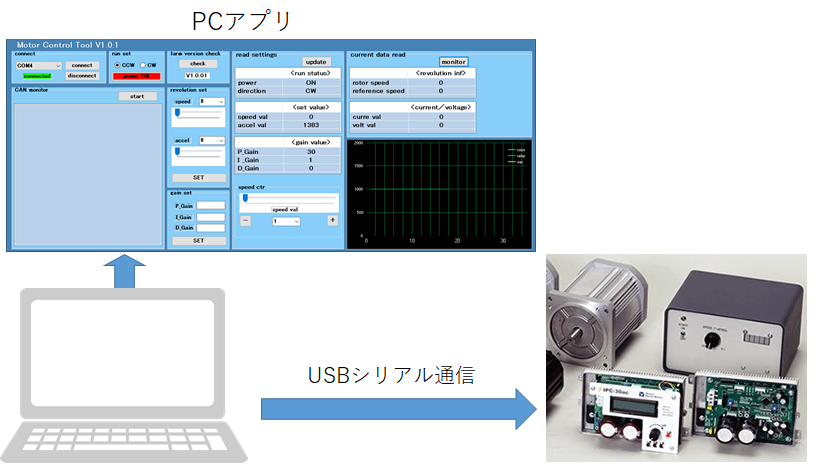
IPMモータのコントローラーとPCをUSBのシリアルケーブルでつなぎ、PC上の通信アプリで設定変更する為のツール開発でした。シリアル通信に関しましては、Uartのベースプログラムができていましたので、その他、新たに機能を追加していきました。
喜ばしいことに、最近ようやくお客様にモータコントローラーの「パラメータ設定変更用の通信アプリ」として提供させていただくことができました。

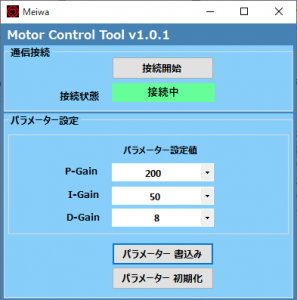
<お客様に提供させていただいたアプリ機能の紹介例>
・モータの出(PID)ゲインを変更する機能
・コントローラーの識別IDを書き換える機能
・回生ブレーキの強度設定を変更する機能
・モータ回転数の上限・下限変更
・モータの回転上昇スピードの設定変更
これらの機能に不随して
・コントローラーにゲイン等のパラメータを保存する機能(書換え)
保存機能は、お客様が自ら調整し設定したパラメーターで、コントローラーの電源を切っても記録され残っています。次回電源を入れた時に、そのまま調整済みのパラメータを使用することができます。また通信アプリにて、簡単に初期値に戻すことができるようにしています。(工場出荷時状態)
お客様には未だ提供しておりませんが、負荷電流の上限・下限、温度設定の上限・下限設定、トルク制御の設定など、その他、設定変更可能なパラメータはございます。
また回転中のモータの回転数や電圧・電流・センター接続温度をリアルタイムに表やグラフに表示させる機能にも取り組み中です。
PCの設定変更通信アプリもカスタマイズが可能となっています。
<②モータの特性試験>
主にお客様が要望した通りのモータが設計できているかを試作段階で試験します。
モータに負荷(回転を止めようとする力)を与え、「電流(A)」、「回転数(r/min)」、「トルク(N・m)」、「出力(W)」、「効率(%)」などの変化をグラフで表し、期待通りの特性になっているのかを確認します。
例えば、自作(参考)データで作成した上図のグラフにて「出力が165(W)時に、回転数が100~105(r/min)のモータが欲しい」、「トルクが20(Nm)で、回転数が100(r/min)で効率のピークが来るモータが欲しい」など、お客様の要望をかなえる為に、様々な用途に合ったモータをカスタマイズ仕様にて設計をしております。お客様の数だけ、更に用途の数だけ特性の異なるモータを製造していることになります。磁石(磁力)、ロータコイルの巻き数、モータの形状などの組み合わせで ご要望を実現いたします。
ギアが一体型のモータですと、モータ+ギアの組み合わせとなり設計の幅が広がります。小型でパワフルなトルクのモータも製作できます。遊星ギアのラインナップも進めていますので、今後更に小型化が見込めそうです。更にモータのラインナップとしまして、「マグネットモータ」、「(マグネットレス)整流子モータ(ユニバーサルモータ)」、「(ブラシレス)IPMモータ」と用途により選び分けることができます。IPMモータの場合、モータコントローラーが有る為、更に細かい制御が可能となります。モータコントローラーの制御(プログラム)もお客様のご要望によりカスタマイズ仕様が可能になっております。
先程の、<①モータコントローラ+アプリ開発>でも紹介しましたが、回転数の上限・下限変更、回転の立ち上がり速度の調整、ゲイン調整、回生ブレーキの有無及びブレーキの効き具合、トルク制御、モジュールの温度管理の調整や、その他、Uartシリアル通信+α、CAN通信、LED・7セグディスプレイ、GPIOによるアラーム等の信号出力、などのカスタマイズが可能です。その他ご要望がございましたら、必ずしもご期待に沿えることができるかわかりませんが 御気軽にご相談ください。

余談ですが、少し前まで特性試験中のモータ回転数の読み取りで、デジタル回転計に表示される値を目視で確認し、紙に記録していました。最近ようやく、ボタン1つで自動で回転数データを取り込める様にしました。(デジタル回転計の配線を接続しただけですが、長年 紙に記録していたようで・・・自動化=DX(デジタルトランスフォーメーション)の一環ですかね。)
また、最近までグラフの作成も(エクセルで作成しない場合は)、定規を使って手書きで書いていました。
そこで、私が学生の頃使っていたROOTという「データ解析環境および関連するライブラリ群」の一つの機能であるグラフ作成ツールを使ってモータの特性データをグラフ化しました。
あのWWW(Web)やHTMLを発明したことで有名なCERN研究所で開発されているツールです。まさかROOTで4軸グラフを作成できるとは思っていませんでした。matplotlibというグラフが書けるツールも試してみたのですが、pythonのimportなどの導入でつまづき諦めました(pythonはバージョンがごちゃごちゃで…)。そこで使い慣れていたCERN ROOTで、物凄く大変でしたがグラフを作成できました。
ROOTの特徴は、プロットのフィッティングが比較的簡単なところと、C++でのプログラムで融通が利くところです。
先程の上図のグラフは分かりやすくするため、1データだけを載せましたが、5でも10データも好きなだけ重ねてグラフ表示することができます。またx軸を指定すると、y軸の値を計算して取得できるのも良いところです。問題点は、日本語表示が苦手なところです。無理やり日本語化ライブラリを導入しています。漢字が中国語表示の様になります。まだまだ未完成ですが、引き続きグラフ作成ツール on ROOTを改良していきます。手書きのグラフが欲しいというお客様方もいらっしゃいますので、一概に自動化が良いとは限りませんが、様々なパターンに対応できますよう努めて参ります。
最後に
今回は私の業務内容の一部を紹介させていただきました。入社して驚いたのですが、幅広く多種多様な設計・開発を行っております。その一つが「カスタム設計」です。本ホームページに記載されています通り、明和製作所の特徴としまして「カスタム設計」を売りとしています。それぞれの顧客ごとのオリジナルモータを製造しています。モータのフレームの形から、回転特性(温度やロックトルクなども)、IPMモータに至っては、コントローラーの制御(プログラム)までカスタムにて設計を行っています。ギアが一体型のギアードモータの設計も定評が有ります。更にいうならば、試作段階からご一緒に製品開発を進めているところが弊社の大きな特徴だと言えます。
また技術力向上の一環としての「勉強会」という研究開発を行っております。今はIPMモータ+コントローラーでAGV(無人搬送車)を製作中です。
製作の途中ですが、次回のブログで一部を紹介したいと思います。
ご拝読、ありがとうございました。
