モータ回転のPID制御、ゲイン調整について
こんにちは。今月のブログ担当、Aです。
コロナも第8波を迎え、周りでも感染したという話をちらほら聞くようになりました。
幸い私も家族も未だ感染せずに踏ん張っております。
とはいえ第8波もピークを超えた感はあり、ある程度は落ち着いてくるんじゃないでしょうか。
全国旅行支援も再開されていますので、今回はそれ利用して温泉でも行きたいなぁと考えています。

ちょっと調べてみたところ、支援の内訳としては旅行代金の20%(一泊上限3000円)+クーポン(平日2000円/休日1000円)となっているみたいです。
つまり一人4000円~5000円安く泊まれるということなので、普段は利用しないようなワンランク上の温泉旅館に泊まるのもアリですね。
さて、ここから本題です。
当社の「IPMモータ」や「SRモータ」等のブラシレスモータ用のコントローラは回転を制御するためにPID制御を使用しています。
PID制御によってモータの回転数が目標の回転数で安定する様に制御しているわけです。
とういことで今回はPID制御の簡単な概要と、PID制御のゲインを調整した場合のモータ挙動の違いについてご紹介したいと思います。
■PID制御について
PID制御は、比例制御(Proportional)、積分制御(Integral)、微分制御(Differential)を組み合わせた制御方法で、目標値に対しての操作量を制御する手法です。
それぞれの頭文字をとってPID制御と呼ばれているわけですね。
この制御手法はモータ制御や温度制御、ロボット制御等、様々な分野で使われており、制御手法としては一般的なものです。今回はモータの回転に関するPID制御について簡単に紹介したいと思います。
モータに一定の電力が供給されている回転中は、回転に対して外力が働かないかぎりは一定速度で回転しますが、通常はモータ軸に負荷を取り付けて使用するため、モータに負荷が掛かる状態が発生します。
モータに負荷が掛かるとその大きさに応じて瞬間的に回転数が変動するため、その回転数を一定に保とうとする力をPID制御で調整します。
PID制御は、P制御、I制御、D制御を組み合わせた制御になりますが、それぞれ単体で制御した場合、ゲイン変化に対してモータ回転の挙動がどのように変化するかを簡易的に表したものが下記です。
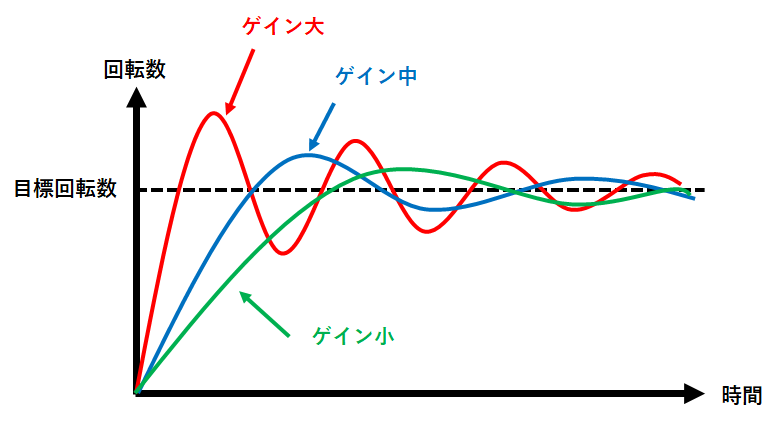
・P制御(比例)
目標回転数に対しての差分によって操作量(電流)を調整する。
ゲインを大きくすれば目標値に近づくのが速くなるが、その分オーバーシュートも大きくなる。
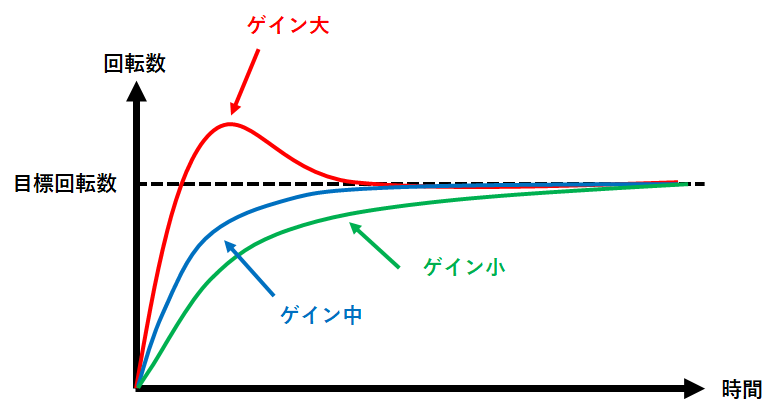
・I制御(積分)
制御開始から現在までの誤差の蓄積量によって操作量(電流)を調整する。
外力によって目標値に到達しない場合等に誤差がどんどん蓄積し操作量が大きくなる。
ゲインを大きくすれば、外力に対しての力が大きくなり速く目標値に近づけるが、オーバーシュートも大きくなる。
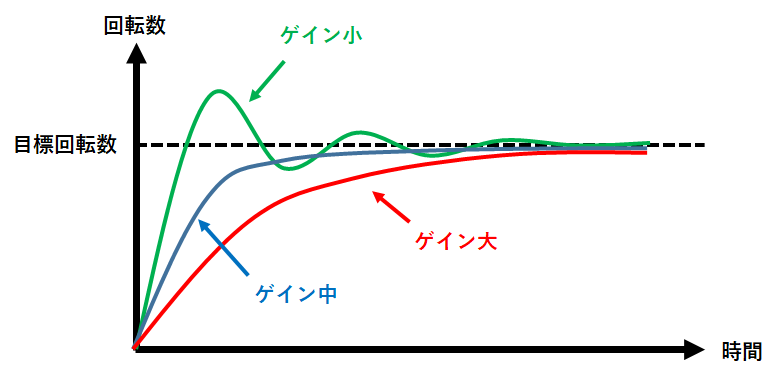
・D制御(微分)
目標値に対する速度に応じて操作量(電流)を調整する。
目標値に近づく速度が速すぎるとブレーキ、遅すぎると加速する。
ゲインを大きくすれば振動は小さくなり、目標回転数にゆっくり近づく。
各制御を組み合わせてゲインを調整することでモータが目標回転数に到達する時間を速くしたり、負荷の変動に伴う回転数の変動を抑えたりすることができます。
ただし、ゲインを大きくすることで操作量(電流)も大きくなるのでそこはうまくバランスをとる必要があるかと思います。
ここでは概要だけを簡単に紹介させていただきました。PID制御についてもっと詳しい内容が知りたい方は専門書等をご覧ください。
■PIDゲイン調整前後の比較
実際にPIDゲインを変更した場合にモータ回転数がどのように変化するか、社内で行った試験結果を比較してみました。
下の波形は、定速(1800 r/min)で回転中のモータに負荷を掛け、負荷開始時と負荷終了時の回転数の変化を見た波形です。

ゲイン調整前後の波形を比較すると、ゲイン中 → ゲイン大と増加するに伴って、モータ回転数のオーバーシュートが改善されています。
その反面、目標回転数に速く到達させるために操作量が大きくなり電流も大きくなるため、許容範囲やバランスを見て調整することが必要です。
最後に、
モータの使用方法によって負荷変動による回転数の変化を極力抑えたい等、お客様の方でご要望がございましたらご要望に合わせてゲイン調整させていただきますので、弊社担当にご相談ください。
弊社のブラシレスモータ用コントローラは速度制御機能を搭載しており、その他機能として正逆運転・タイマー運転・シーケンス制御・トルク制御・出力制御等の対応や、オプションとしてCAN通信も搭載可能です。
電源についても、AC用(100V~120V/200V~240V)とDC用(24V~72V)をラインナップしておりますので、用途に応じてご選択いただけます。
実際の用途としてはポンプ用、農機具用、工事車両用、小型EV用、撹拌機用等、多岐にわたりご採用いただいております。
弊社では、発電機の他モータ及びドライバの設計・製造も承っております。
発電機・モータに関するお困りごとがございましたらお気軽にご相談ください。
今回の内容は以上です。
