CAN通信を使用したモータ制御について
こんにちは。
今月のブログ担当、入社一年目のAです。
毎日暑い日が続きますね。そう、気づけばもう7月ですよ。
私は暑すぎるのも寒すぎるのも苦手なので、ちょうどよい秋が一番好きです。
それに、暑いと感じたり寒いと感じたりすると仕事の効率も悪くなるそうです。
快適な温度から1℃違うだけでも数%の効率ダウンになるんだとか。
よい仕事はよい仕事環境からということですね。
ちなみに、暑いときより寒いときのほうが痩せやすいらしいですよ。
前置きはこれくらいにして本題です。
今回の内容は、現在テスト中のCAN通信という通信方法について少し紹介したいと思います。
当社製品のブラシレス(IPM)モータには駆動を制御するためのドライバ基板がありますが、このドライバ基板にCAN通信の機能を搭載することで、シリアル通信によるモータの制御が可能になるという話です。
以降、CAN通信という通信方法について少し触れます。
■CAN通信とは
CAN(Controller Area Network)は国際的に標準化されたシリアル通信プロトコルです。
自動車業界では標準的に使用されている通信プロトコルであり、性能と信頼性の高さから、FA、産業機器、IoT等の広い分野でも使用されています。
メリット・デメリットがあるので、それを踏まえたうえで使用することが大事ですね。
■CAN通信のメリット
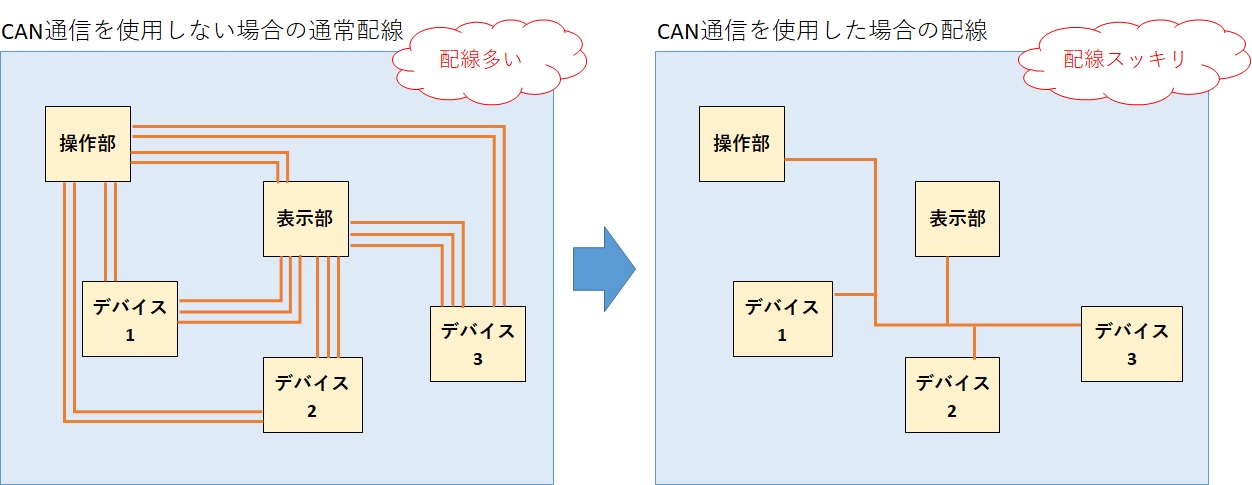
1.少配線で構成できる
CAN通信では2本のケーブルで構成されるライン型の通信ネットワーク(バスライン)に、各制御機器やモータドライバ等(ノード)を接続していく様な構成になります。
各ノードからの送受信データは全てこの2本のケーブルで構成されるバスライン上を流れるので、それ以外の無駄な配線をなくすことが可能です。
また、配線が減ることにより接続端子部分も減るため、接続不良等の不具合も少なくすることができます。
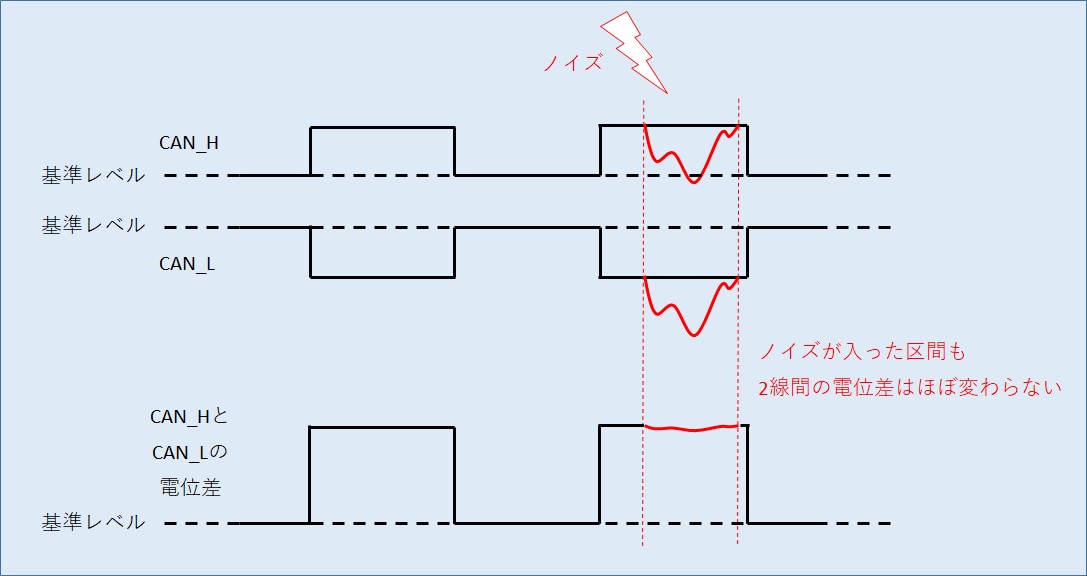
2.ノイズに強い
CAN通信では2本のケーブルに流れる2つの信号(CAN_H,CAN_L)の電位差で”Hi”か”Lo”を判定します。
そのため外部からノイズを受けた場合でも、同じ経路で配線された2本のケーブルにはほぼ同等のノイズが加わることになり、結果として電位差は変わらずに信号を伝送することが可能です。
■CAN通信のデメリット
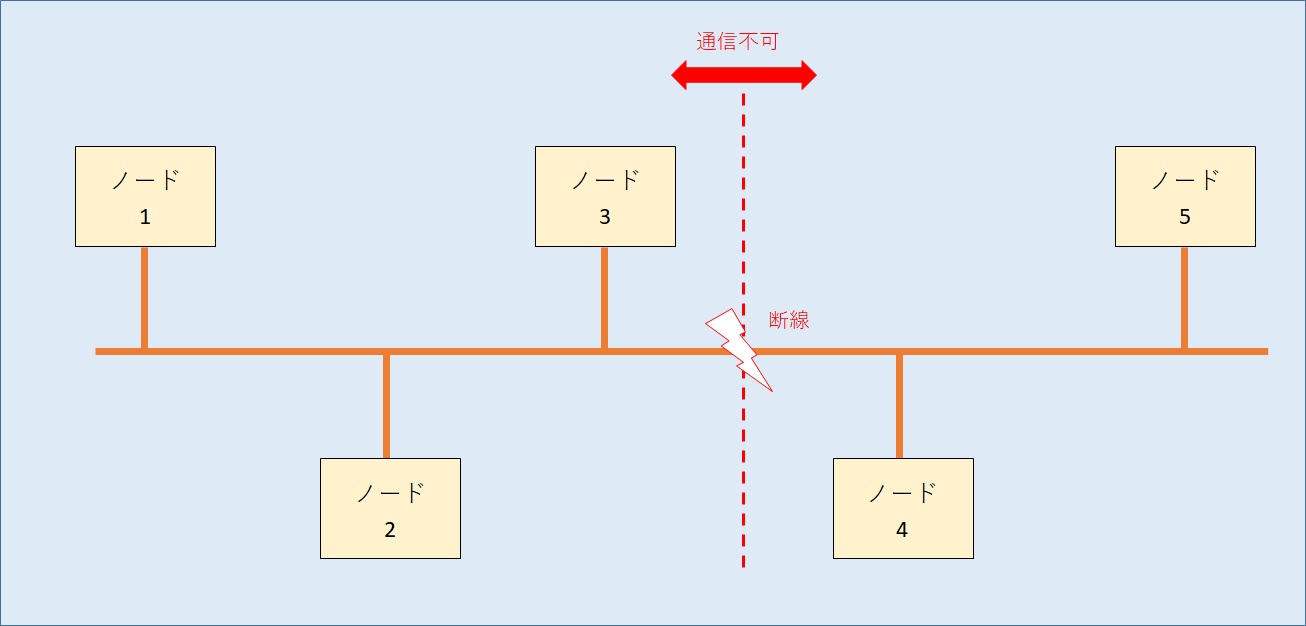
1.ケーブル不具合で全通信に支障
CAN通信では各ノード間の通信を1本のバスラインで構成しています。
そのため、バスラインに断線等の不具合が発生した場合には、断線した箇所以降に接続されているすべてのノードにおいて、断線カ所を通る経路では通信ができなくなってしまいます。
CAN通信を使用したモータ制御の例
最後にCAN通信を使用したモータ制御の例について紹介します。
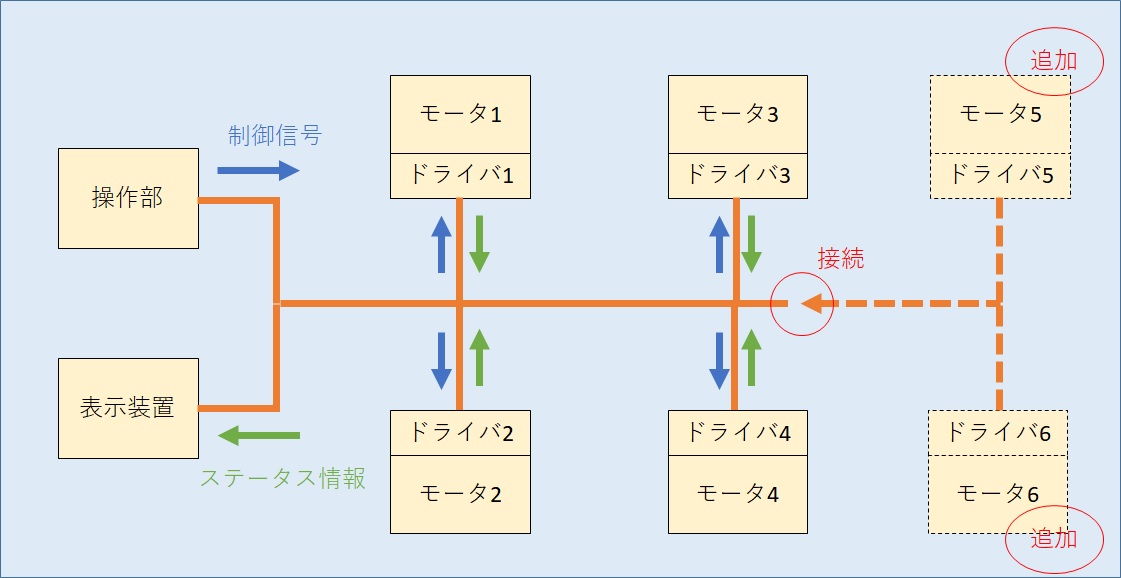
下図は、操作部、表示装置、4つのモータドライバをCAN通信で接続した例です。
操作部からCAN通信で接続された4つのモータドライバ(モータドライバ1~4)に対して同時にスタートや回転速度等の指令を出しつつ、各モータドライバからは電流や回転数等のデータを表示装置に送信し、状態を確認できるようにしています。
この様にCAN通信を使用することで少配線の構成にすることができます。
また、新たにモータ(モータ5,6)を追加したいといった場合にも、プログラムの変更等は必要になりますが、物理的には2本のケーブルでバスラインに接続することで追加が可能です。
今回の内容は以上になります。
図表内に記載しているドライバというのは、コントローラやインバータと呼ばれることもあり、同様の意味で使われることも多いです。
厳密に区別すると、
・モータドライバ ・・・ モータを運転するための制御装置や素子や部位や回路
・インバータ ・・・ 直流から交流に変換する電源装置
・コントローラ ・・・ 装置全体の制御
ACモータのドライバには速度制御の手段として内部にインバータが組み込まれていたりするので、本来モータドライバと呼ぶべきものを「インバータ」と呼ぶこともあります。
当社では、モータだけでなくドライバ、コントローラの設計・製造も行っております。
また、よりよいものを作るために新しい技術開発にも取り組んでおります。
モータに関するお困りごとがございましたらお気軽にご相談ください。
追記:
CAN通信を装備した弊社のIPMコントローラー[IPC-30DC]カタログpdf および解説ブログご参照ください
